科学探索|?仿生电子鼠会做灾后搜救了:载重物爬窄管不在话下,跌倒还能自己站起来( 二 )
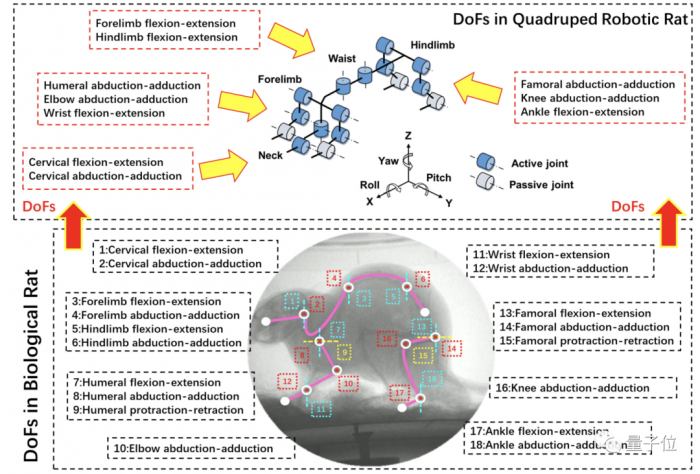
【科学探索|?仿生电子鼠会做灾后搜救了:载重物爬窄管不在话下,跌倒还能自己站起来】自由度是独立变量的个数 。具体而言,若总变量个数为 N,约束条件个数为 M,则自由度 F=N-M 。
文章图片
机器小鼠的四肢结构设计示意图如下:

文章图片
▲ 图 a、b 分别为左前肢的机构运动简图和骨架模型结构;c 为左后肢的骨架模型侧视图
相比前肢,后肢的底部为一个更弯曲的杆,以提供更大的前推力 —— 这与老鼠主要依靠后肢产生推力的现象一致 。
研究者分析老鼠行为发现,它的转身运动是从头部到躯干,再到臀部,逐步发力的 。
受益于灵活的脊柱,老鼠可以迅速变换方向 。
小鼠的颈椎由好几节构成,其中第一节颈椎的旋转角反映了头部和躯干之间的角度 。
下面的关节旋转角度图中,有三个峰值,对应三个最明显的运动,即:颈椎屈伸、
前肢第二胸椎的屈伸运动,和第十三胸椎的后肢屈伸运动 。

文章图片
因此,研究者为脊柱配备了三个关于屈伸的主动自由度,用于机器小鼠的正面转弯运动 。
由于颈部旋转在老鼠的日常活动中很少见,所以真老鼠的颈部活动对设计探测机器人来说,意义不大 。
研究者配置了一个用于颈部屈伸的主动自由度,和一个用于颈部内收的主动自由度,这两个自由度都位于头部和躯干的连接处 。
机器小鼠共有 33 个脊椎关节,研究者将后肢屈伸的关节设置于第 22 个关节处,这与老鼠的对应的关节位置相似 。
研究团队介绍
这项研究来自北京理工大学 。

文章图片
论文一作石青,现任北京理工大学教授、机电工程学院智能机器人研究所副所长,本科和博士均毕业于北理工,并于早稻田大学进行博士后工作,主要研究方向是仿生机器人、生机电融合 。

文章图片
这篇论文由石青导师黄强、中科院外籍院士福田敏男,以及石青带领的仿生机器人团队共同完成 。
团队研究的仿生鼠,曾被昆士兰大学计算机教授 Janet Wiles 评价称“达到业界 SOTA 水平” 。
团队表示,未来还将通过闭环控制和深入动态分析等方法,来进一步提高机器小鼠的敏捷性,并且有兴趣将其商业化 。
你觉得这只机器小鼠还能被用在哪些地方呢?
论文地址
https://ieeexplore.ieee.org/document/9751239
- 科学探索|科学家研发毫米级机器人 可实现人体内靶向给药
- 科学探索|野生蝙蝠被发现可在4年后识别跟食物奖励相关的铃声
- 科学探索|盘点大自然6种能使身体部位再生的动物
- 科学探索|中国空间站的光学舱:巡天空间望远镜预计2024年投入科学运行
- 科学探索|科学家发现了本质上不会衰老的物种
- 科学探索|问天实验舱器箭组合体今天进行垂直转运
- 科学探索|新研究揭示了大象是如何避免癌症的
- 科学探索|一种新开发的抗生素被发现可以杀死耐药性细菌
- 科学探索|增材纺织法造出人工心室模型
- 科学探索|MIT团队找到改善工业沸水工艺的方法